
Robot Feet, Part 1
Published:
Robot Feet
I’ve been playing with robot dogs at CT State Middlesex. They’re fun!
The BlueDog App
Because we have ten of these dog robots, I wanted to see about getting them to all work in unison. For some reason, the code that comes with them doesn’t connect to more than four or five at a time.
So I wrote an app that I called BlueDog because it uses Bluetooth to talk to the dogs.

What Next?
The next thing I wanted to do was see if we could change the dog’s head. Petoi, the company that makes the dogs, released all the CAD as open source, so I downloaded it. I wanted a different head and thought it would be funny to add a Baby Yoda (Groku) head to one of the robots.
Why feet?
As you can see in the video above, the robots walk quite nicely on smooth surfaces. Unfortunately, they tend to get caught up when walking on carpet, even very smooth carpet.
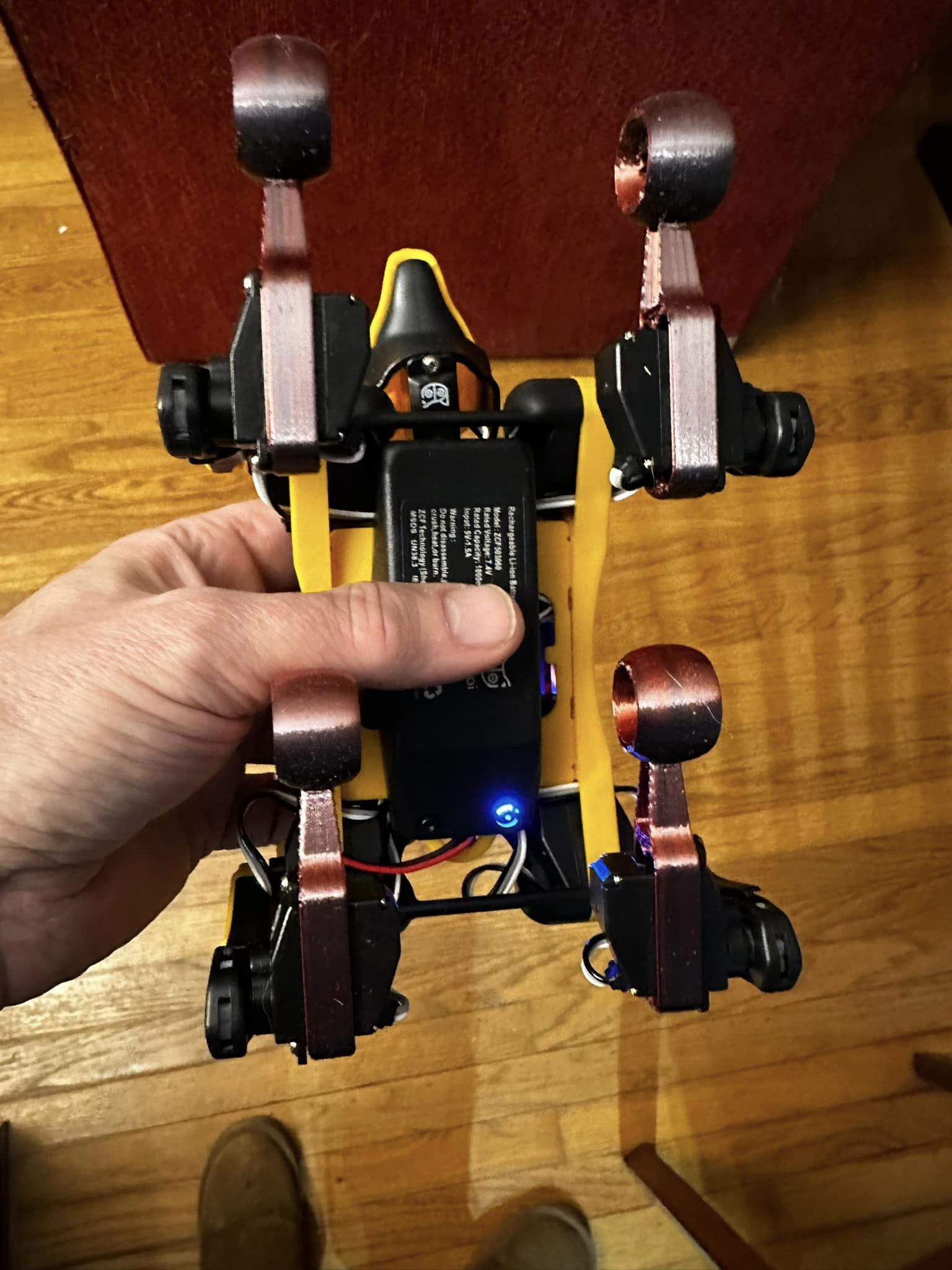
Part 1: Make Feet Bigger and Smoother
My first thought was to make the radius of curvature of the feet bigger and to remote the corrugations on the surface. So I did that, as you can see below.

Unfortunately, that didn’t help the dog’s ability to walk on carpet.
Part 2: How to design feet?
My initial attempts to find out how to design robot feet met with not many good results.
Eventually, I found this project by Kaela Arts, Lochlan Cuthbertson, Mackenzie Gavin, Qass Huffington, Zoraak Magsi, and Shelby Rawlusyk.
The key part, for me was their innovation:
The design is innovative in its simplicity. It combines the wheel and foot into one mechanism for ease of use. Rather than having an attachable wheel, the wheel was integrated directly into the design and can be easily switched to the ‘foot engaged mode’ by hand. The design is user friendly and can be swapped over in under three minutes.
However, I wanted to dig a bit more.
That digging led me to this masters thesis by Scott Fredriksson.
A picture of Scott’s quadruped is below.
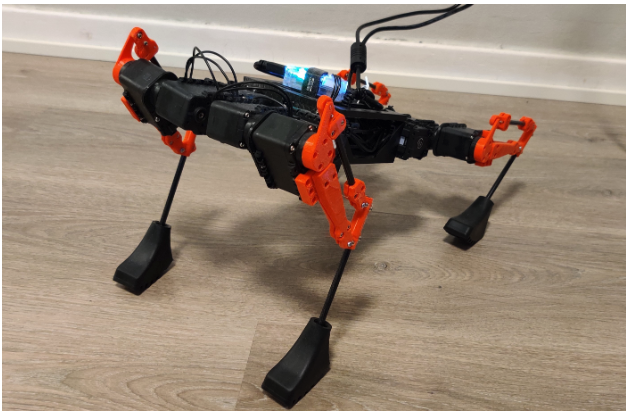
The thesis didn’t seem to have much information about the feet, so I emailed Scott and he was kind enough to respond quickly.
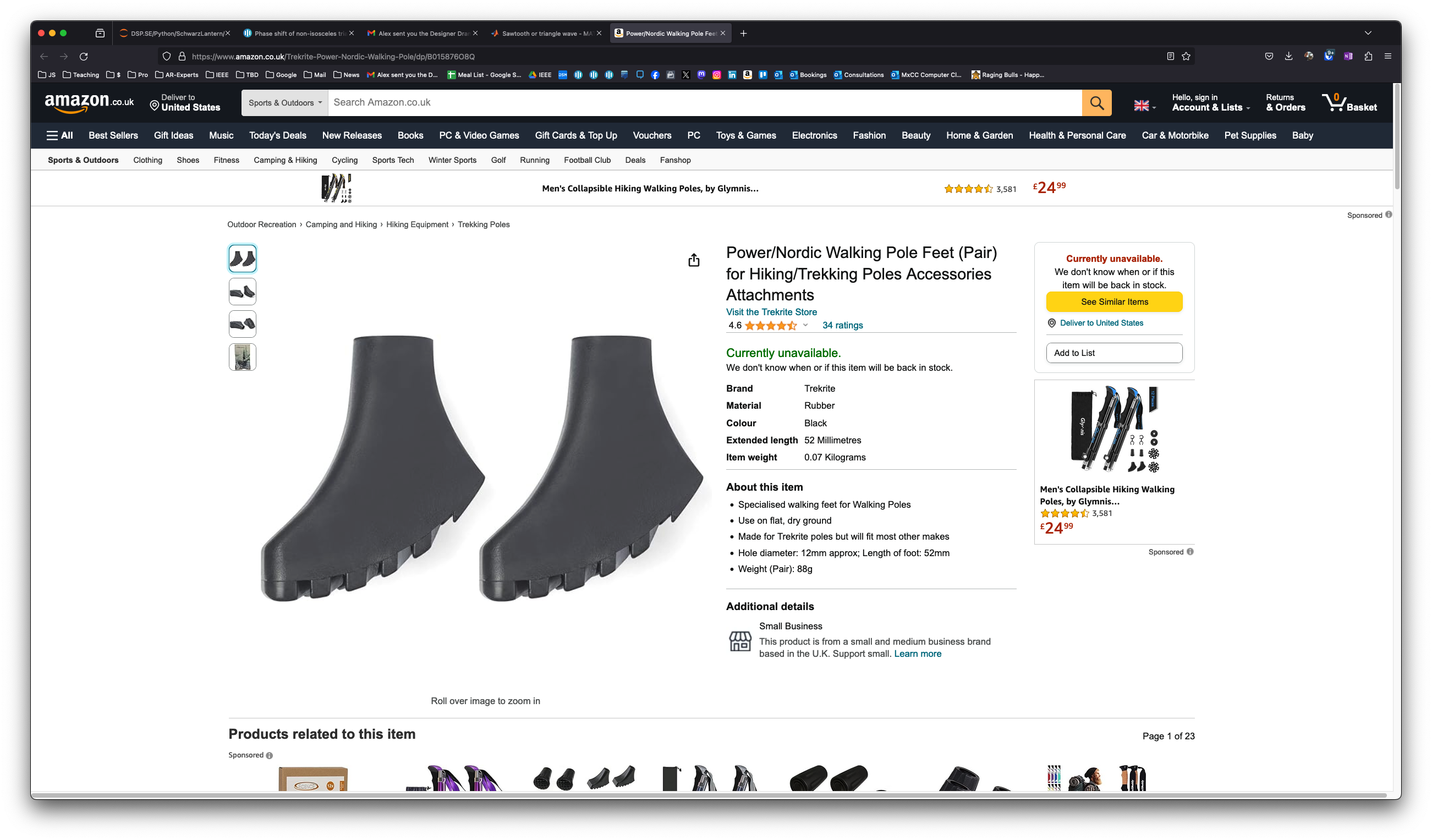
He said he just thought about how hiking sticks have particular shapes. The feet were obtained from Amazon.
Even better, Scott also gave me some references to follow up on.
The bottom line is two things need to work together:
The shape of the foot and
The gait of the robot.
One thing I noticed with the robot on the carpet is that its standard gait doesn’t seem to raise its feet very high. So those are the next things to look at.